Le contrôleur du cobot est un dispositif qui contrôle le mouvement du bras du robot en fonction du programme écrit par l'utilisateur. Il est équipé de ports d'entrée/sortie numériques et analogiques. Divers équipements et dispositifs peuvent être connectés et utilisés.
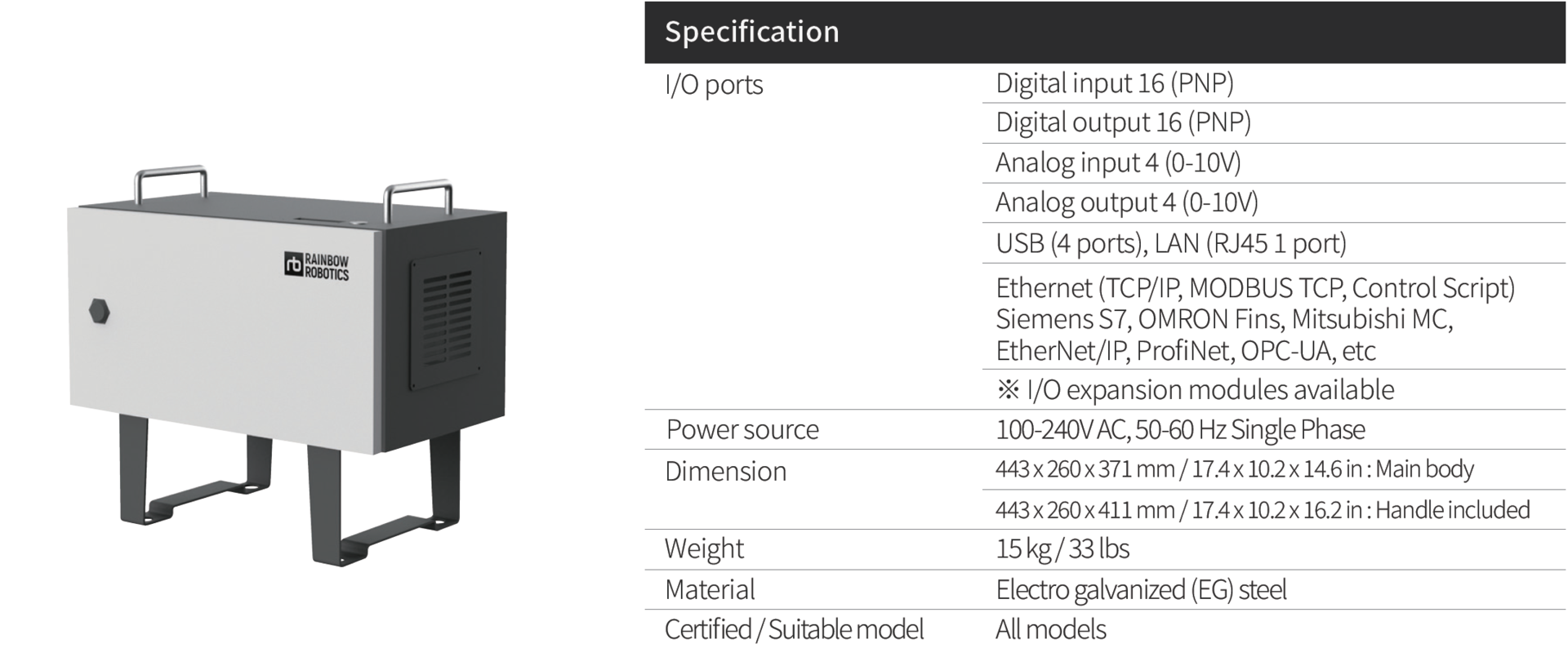
Standard Control Box CB06
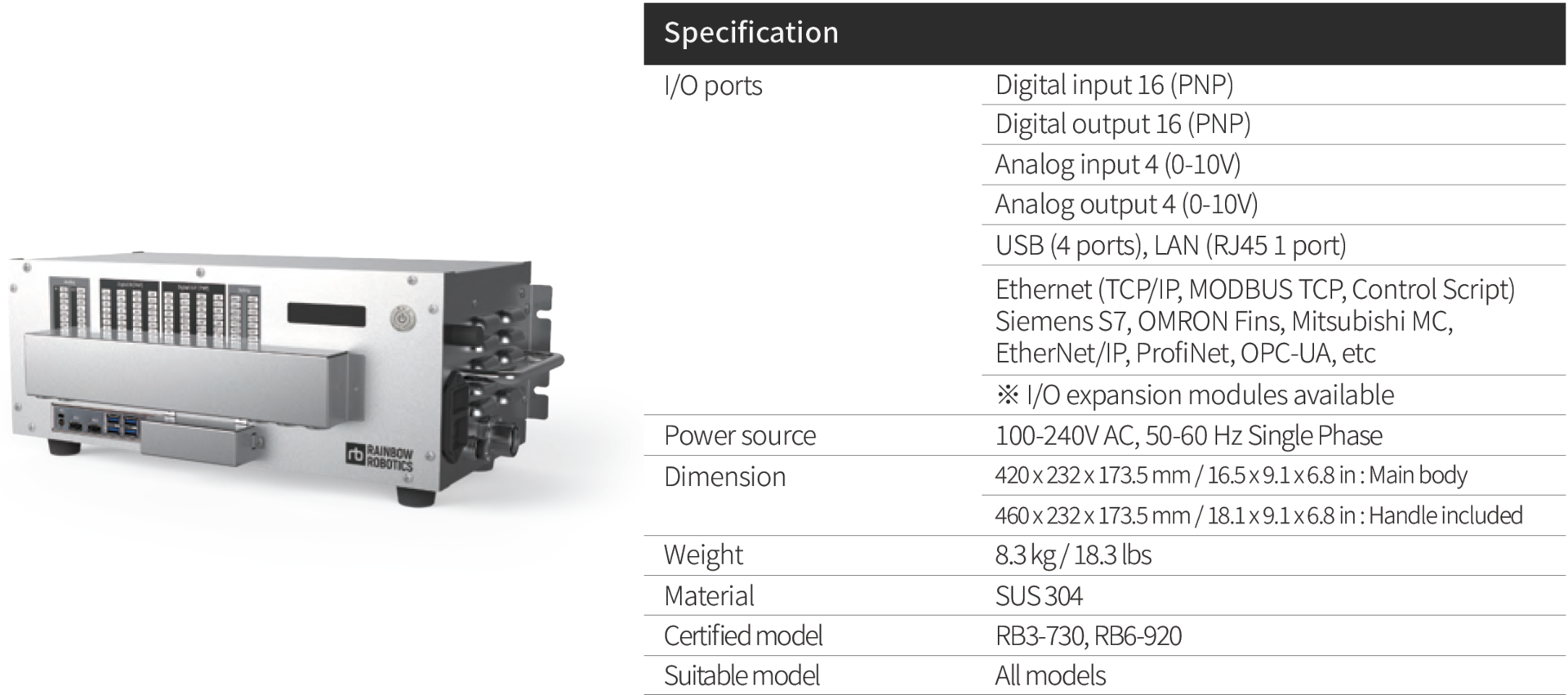
Small Control Box CB07
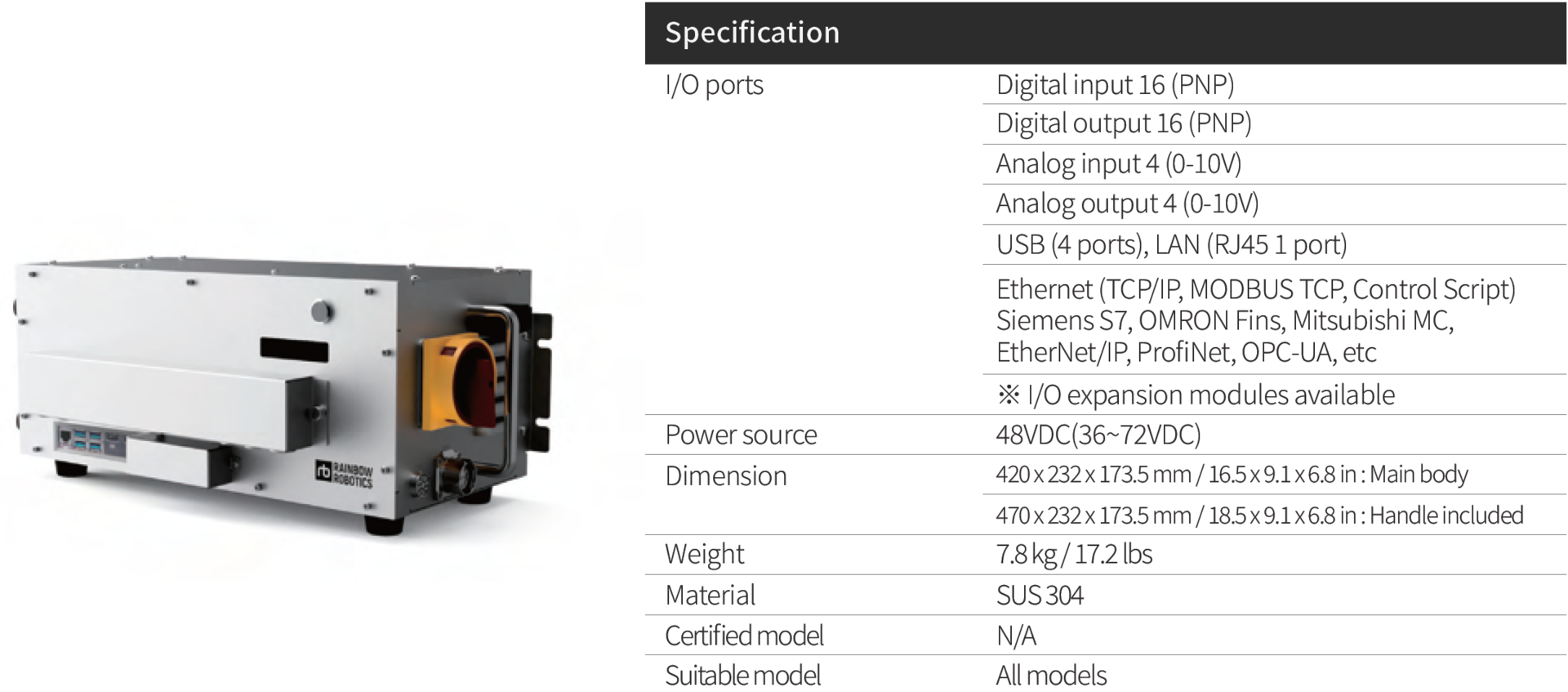
DC Control Box CB09
Module d'expansion d'E/S
La série RB dispose d'un total de 40 ports d'E/S (configuration par défaut). Si plus de ports d'E/S sont nécessaires, les utilisateurs peuvent ajouter des ports sans utiliser d'équipement supplémentaire, comme un PLC, en utilisant le module d'expansion d'E/S.








{kind=link}
{kind=link}